Debugging¶
Note
Wherever you are talking to the bot (command line, slack, facebook, etc), you can
clear the tracker and start a new conversation by sending the message /restart.
To debug your bot, run it on the command line with the --debug flag.
For example:
python -m rasa_core.run -d models/dialogue -u models/nlu/current --debug
This will print lots of information to help you understand what’s going on. For example:
1 2 3 4 5 6 7 8 9 10 11 12 | Bot loaded. Type a message and press enter:
/greet
rasa_core.tracker_store - Creating a new tracker for id 'default'.
rasa_core.processor - Received user message '/greet' with intent '{'confidence': 1.0, 'name': 'greet'}' and entities '[]'
rasa_core.processor - Logged UserUtterance - tracker now has 2 events
rasa_core.processor - Current slot values:
rasa_core.policies.memoization - Current tracker state [None, {}, {'prev_action_listen': 1.0, 'intent_greet': 1.0}]
rasa_core.policies.memoization - There is a memorised next action '2'
rasa_core.policies.ensemble - Predicted next action using policy_0_MemoizationPolicy
rasa_core.policies.ensemble - Predicted next action 'utter_greet' with prob 1.00.
Hey! How are you?
|
Line number 4 tells us the result of NLU parsing the message ‘hello’.
If NLU makes a mistake, your Core model won’t know how to behave. A common
source of errors is that your NLU model didn’t accurately pick the intent,
or made a mistake when extracting entities. If this is the case, you probably
want to go and improve your NLU model.
If any slots are set, those will show up in line 6.
and in lines 9-11 we can see which policy was used to
predict the next action.
If this exact story was already in the training data and the
MemoizationPolicy is part of the ensemble, this will be used to predict
the next action with probability 1.
If all the slot and NLU information is correct but the wrong action
is still predicted, you should check which policy was used to make
the prediction. If the prediction came from the MemoizationPolicy,
then there is an error in your stories. If a probabilistic policy
like the KerasPolicy was used, then your model just made a
prediction that wasn’t right. In that case it is a good idea to run
the bot with interactive learning switched on so you can
create the relevant stories to add to your training data.
Visualizing your Stories¶
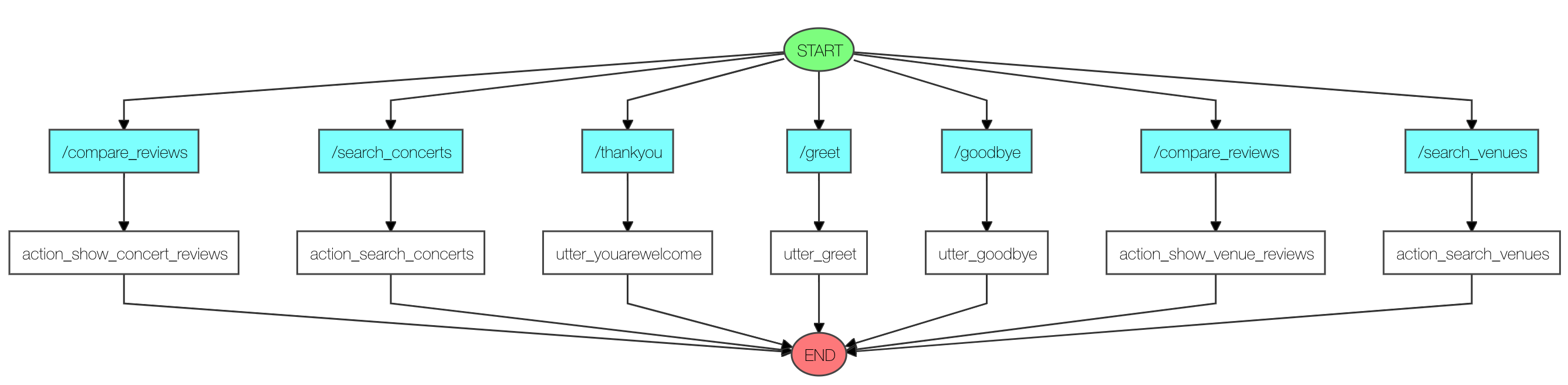
Sometimes it is helpful to get an overview of the conversational paths that are described within a story file. To make debugging easier and to ease discussions about bot flows, you can visualize the content of a story file.
You can visualize stories with this command:
cd examples/concertbot/
python -m rasa_core.visualize -d domain.yml -s data/stories.md -o graph.html -c config.yml
This will run through the stories of the concertbot example in
data/stories.md and create a graph which can be shown in your browser by
opening graph.html with browser of your choice.
We can also run the visualisation directly from code. For this example, we can
create a visualize.py in examples/concertbot with the following code:
from rasa_core.agent import Agent
from rasa_core.policies.keras_policy import KerasPolicy
from rasa_core.policies.memoization import MemoizationPolicy
if __name__ == '__main__':
agent = Agent("domain.yml",
policies=[MemoizationPolicy(), KerasPolicy()])
agent.visualize("data/stories.md",
output_file="graph.html", max_history=2)
Which will create the same image as the previous command. The graph we show here is still very simple, graphs can quickly get very complex.
You can make your graph a little easier to read by replacing the user messages
with real examples from your nlu data. To do this, use the nlu_data flag,
for example --nlu_data mydata.json.
Note
The story visualization needs to load your domain. If you have
any custom actions written in python make sure they are part of the python
path, and can be loaded by the visualization script using the module path
given for the action in the domain (e.g. actions.ActionSearchVenues).
Have questions or feedback?¶
We have a very active support community on Rasa Community Forum that is happy to help you with your questions. If you have any feedback for us or a specific suggestion for improving the docs, feel free to share it by creating an issue on Rasa Core GitHub repository.